Decision Making For Multi-Robot Fixture Planning Using Multi-Agent Reinforcement Learning
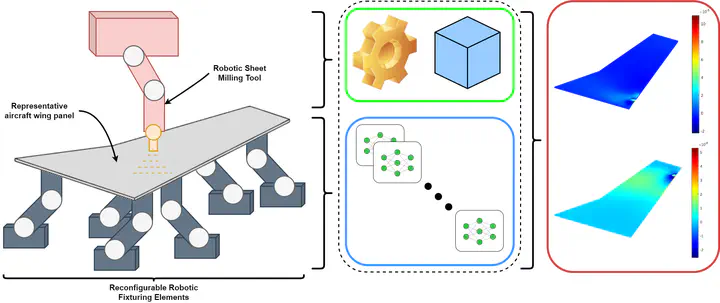 Overview of the multi-agent approach for determining optimal fixture plans using reinforcement learning.
Overview of the multi-agent approach for determining optimal fixture plans using reinforcement learning.Abstract
Within the realm of flexible manufacturing, fixture layout planning allows manufacturers to rapidly deploy optimal fixturing plans that can reduce surface deformation that leads to crack propagation in components during manufacturing tasks. The role of fixture layout planning has evolved from being performed by experienced engineers to computational methods due to the number of possible configurations for components. Current optimisation methods commonly fall into sub-optimal positions due to the existence of local optima, with data-driven machine learning techniques relying on costly to collect labelled training data. In this paper, we present a framework for multi-agent reinforcement learning with team decision theory to find optimal fixturing plans for manufacturing tasks. We demonstrate our approach on two representative aerospace components with complex geometries across a set of drilling tasks, illustrating the capabilities of our method; we will compare this against state of the art methods to showcase our method’s improvement at finding optimal fixturing plans with 3 times the improvement in deformation control within tolerance bounds.
Eytan Canzini
Research & Teaching Associate, Systems & Control
Space Systems, Machine Learning, Control & Game Theory