Robotic inspection systems can be used for thin-film wafer inspection. These systems perform constrained tasks repeatedly, which can be investigated and monitored.
By exploiting elements of Riemannian geometry, we can find embedded constraint manifolds and develop continuous paths across them
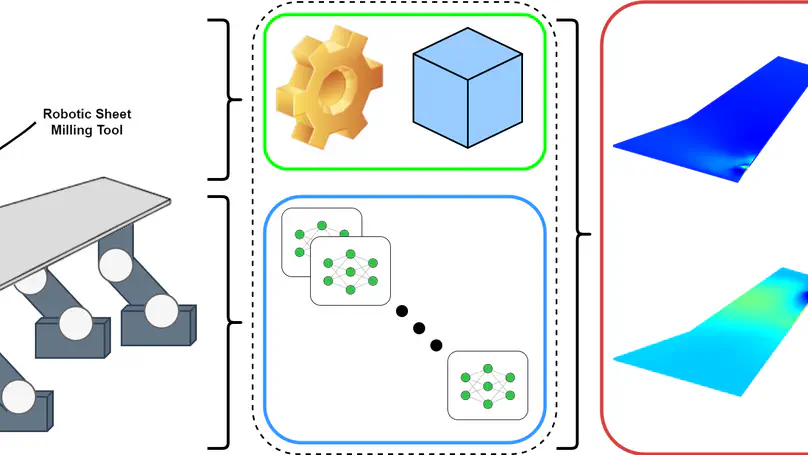
To create optimal fixturing plans for autonomous manufacturing, we combine a team theoretic approach to understanding optima with reinforcement learning to find fixturing plans.
Using a multi-sensor Kalman filter, we can construt a sensing template to allow for accurate positioning of large aerospace components.